I'm Mahmubul Hoque
Mechatronics Engineer
UWaterloo Grad
Tech Enthusiast
Shh.. Batman
About Me
Who I Am
About Me
I'm currently an Engineer on the hunt for my future career. I have a serious passion for smart tech and space travel!
- Name: Mahmubul Hoque
- Birthdate: 12 May 1994
- Address: ON, CA
- Employment Status: Actively Searching
- Field: Hardware, Firmware, AI, Automotive, Robotics
- Willing to Relocate: Yes
- Phone: +1 (289) 689-5649
- Email: MahmubulH@Gmail.com
- Skype: MahmubulH
- LinkedIn: MahmubulH
My Resume
My Resume
Where I WorkedHardware/Firmware Engineer - RMF Design and Manufacturing
May 2018 - PresentBeing part of an Engineering team in a small team company, I gained exposure to all aspects of the product design process.
Electrical Design Engineer - Stantec Consulting Inc.
May 2017 - August 2017I would be in charge of designing electrical building sub-systems while adhering to the Canadian Standards Association.
Prototype Engineer - Tesla
September 2016 - December 2016The role involved designing and building test setups to validate EV concepts before implementation into vehicles; Model S & Tesla Truck.
Electrical Engineer - Canadian General Tower Ltd.
January 2016 - April 2016I was a part of R&D to improve the efficiency of various lines, as well as lead of Hardware to update PLCs.
Controls Engineer - Magna
December 2015 - May 2015I was a part of R&D to improve the efficiency of various lines.
Professional Engineer - PEO
In ProgressCurrently pursuing accredidation from the Professioanl Engineering Board of Ontario.
Bachelor of Engineering - University of Waterloo
2012 - 2018Major in Mechatronics Engineering with Honours
Ontario Secondary School Diploma - Westdale Secondary School
2008 - 2012International Baccalaureate Program
Hardware/Firmware
- Board Design | Isolation, Protection, Mixed Signal, High Density
- µC/SoC Development | Bare metal, RTOS
- Firmware Development | C/C++
- Circuit Analysis/Simulation | Spice, Cadence
- Sensor Implementation | Signal Integrity, ADC, DSP
- DAQ Systems | LabView
- CAD | Cadence, Altium, Eagle, OrCAD
- Bench | Oscilloscope, DMM, PSU, Logic Analyzer
- Serial Communication Protocols | SPI, I2C, I2S, UART, USB, CAN, LIN
- Technology | Linux, IAR Compiler, Atmel Studio, LabView, Git, CANalyzer, Matlab/Simulink, Tensorflow
Mechanical
- CAD Modelling/Simulations | AutoCAD, SolidWorks, NX, Catia
- Mechanical Analysis | FEA, Mass, Thermal, Vibrations
- Manufacturing Design | Six Sigma, Lean
- Motor Development
- Actuator/Sensor Design
- Prototyping and Development
Software
- Web Dev | HTML5, CSS, Javascript
- Machine Learning | Python
- Image Processing | Facial Recog, Lane Tracking
- Firmware Programming | C, C++
My Projects
My Projects
portfolio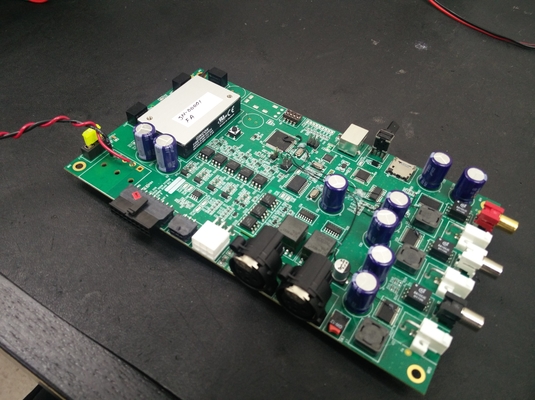

get in touch
get in touch
ContactPhone
+1 (289) 689-5649Address
Ontario, CASocial Profiles
Contact Form
*Since I'm currently hosting on Github (does not support php) the contact form will not work! Please send an email or call me, maybe?

HVAC Communication Interface
- Mitsubishi
- Date : November 2018
- Used Technologies : Design Specification, Hardware Selection, Circuit Design, Firmware Development, Propietary Communication, Prototype Testing
North American thermostats and Japanese HVAC systems are incompatible. I was tasked with designing a board to bridge that gap and allow Mitsubishi to bring their HVAC systems to North America
- ● Implemented program for propietary UART based communication
- ● Built drivers to interface with LCD and Real Time Clock
- ● Prioritized low power consumption; shutdown dormant hardware, pulldown unused GPIO
Pedestrian Avoidance System
- Rosco Vision Systems
- Date : August 2018
- Used Technologies : Design Specification, Hardware Selection, Circuit Design, Firmware Development, CAN Communication, Prototype Testing
Designed a board to issue auditory and visual warnings whenever a pedestrian is too close to the vehicle.
- ● Designed PCB with isolation against high transients from vehicle battery
- ● Implemented library to read *.MP3 files, decode them, and deliver to encoder
- ● Can play audio for 3 speakers up to 90dB, with dynamic environment volume sensing
- ● Built drivers for SPI and CAN communication
Smart Lock
- Personal Project
- Date : May 2018
- Used Technologies : Product Design, Enclosure Design, Circuit Design, Hardware Testing, Python Scripting
Designed a smart lock system that doesn't need keys, but rather uses facial/voice recognition and remote mobile access. The prototype was a Pi based circuit, interfacing with low voltage hardware; stepper motor, low resolution camera, Alexa, etc. This was a solo project that involved working on all aspects of product design. The final goal is to have a commercial product that one would be able to purchase.
- ● Designed circuits to interface with multiple sensors/actuators
- ● Designed enclosure in Solidworks, utilizing mechanical analysis to optimize for impact and environmental
- ● Developed Flask-Ask + Ngrok based Alexa skill to allow voice recognition
- ● Scripted Python based PCA facial recognition software
AR Fit
- Client : University of Waterloo
- Date : April 2017
- Used Technologies : Product Design, Mechanical Analysis, Power Circuit Design, Hardware Testing, AR Simulations, Project Management
The goal was to design a commercial product that facilitates online clothes shopping, while eliminating the major issue of finding the proper fit. This was a team project, within which I was the Electrical lead and Project Manager. The first prototype was created using a Kinect behind a 2 Way mirror, as well as AR scripting with gesture control to allow the user to "try on" various articles of clothing and determine proper fit.
- ● Designed PDU, adhering to CSA and budget
- ● Designed product enclosure, considering mass/thermal distribution and visual appeal
- ● Interfaced with hardware to capture live body dimensions
- ● Designed skins on Blender to overlay clothes onto user
- ● Scripted C# based AR to blend clothes with user's avatar
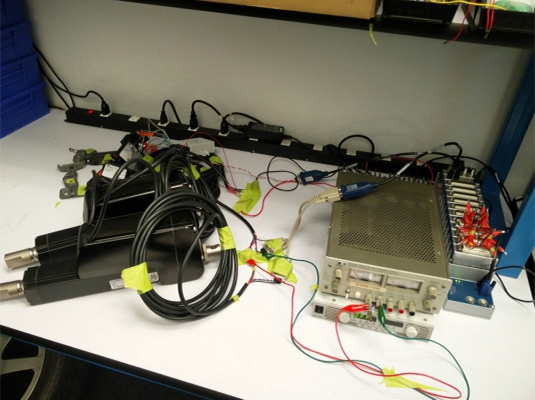
Wind Tunnel Controller
- Tesla
- Date : December 2016
- Used Technologies : Rapid Prototyping, PI Control System Design, LabVIEW Programming, Motor Control, Sensor Feedback, Data Analysis
Since Tesla's products prioritize NDA, it is a challenge to test the aerdynamacy of Tesla vehicles. Normally Tesla would be required to hire third party assets to perform this testing; however, this risked leaking new EV concepts. As such, the goal was to design a test setup to measure the aerodynamcy of Tesla vehicles in house. My involvment was developing the firmware for vehicle control and creating a visualizing of the data.
- ● PI control system with linear actuators for synchronous ride height control and real-time road simulation
- ● Interface with various sensors, from current source to RF input
- ● Created 3D visual to see dynamic pressure changes over chassis of vehicle
- ● Implemented data logging with dynamic data referencing for reverse video playback

Vane Compressor Controller
- Tesla
- Date : December 2016
- Used Technologies : Rapid Prototyping, PID Control System, LabVIEW Programming, Sensor Interfacing, Circuit Design, Noise Filtering, Data Analysis
Created a test setup to verify the effectiveness of a new vehicle compression system. This involved learning spec'ing hardware required, designing circuits, developing the firmware, building the test setup, and gathering data.
- ● Programmed LabVIEW control system with GUI
- ● Rapid design of test circuits with heavy filtering due to high noise environment
- ● Interfaced with multiple sensors, utilizing sensor fusion
- ● Implemented data logging
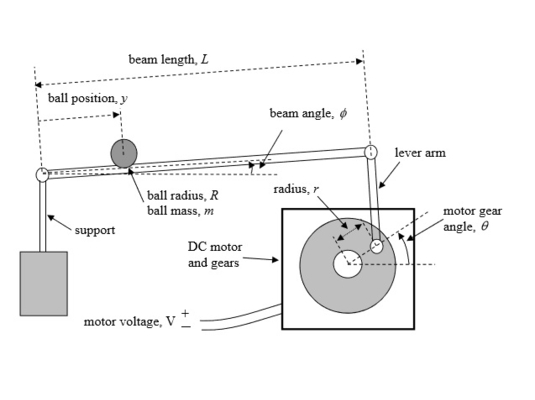
Ball and Beam Control
- University of Waterloo
- Date : February 2018
- Used Technologies : PID/State Space Control System Design, LabVIEW Programming, Servo Motor Control, Encoder Feedback, Sensor Iterfacing, Data Analysis
Picture a motor, a beam, and a ball. Now hold down one end of the beam, attach a motor to the other end and control it's angle. Now put the ball on the beam and try to keep it in the center, 5 cm from one end, 10 cm from one end, etc. As such, the goal of the project was to design a program to spin a motor, controlling the beam angle and maintaining the desired ball displacement.
- ● Designed double feedback PID and State Space control methodology
- ● Programmed LabVIEW control system with GUI
- ● Interfaced with servo motor to control beam angle, adjusting for ball displacement
- ● Interfaced with encoder for beam angle feedback
- ● Ball and beam formed potentiometer for ball displacement feedback
- ● Implemented data logging
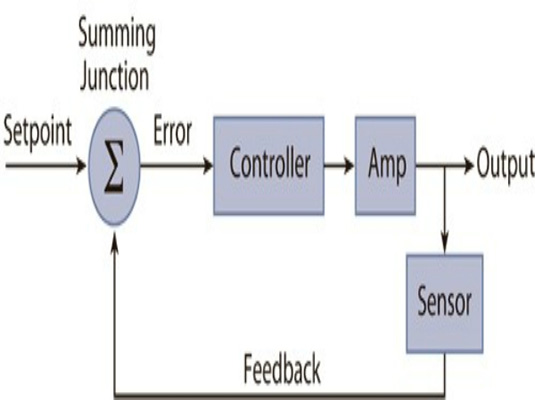
Boiler Heat Control
- Canadian General Tower
- Date : April 2016
- Used Technologies : R&D, Control System Design, PLC Programming, AutoCAD
Implement a PID controller to maintain the desired temperature in a boiler.
- ● R&D PI control system with minimal heat ripple
- ● Interfaced with sensors, spec'd for high heat environment
- ● Programmed Allen-Bradley PLCs
- ● Drafted electrical wiring diagrams in AutoCAD
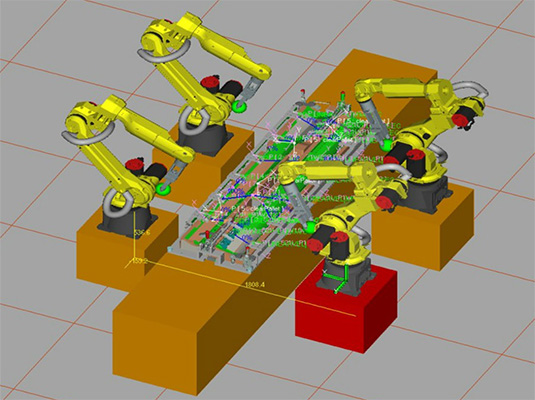
A-Flex Offline
- Magna
- Date : April 2015
- Used Technologies : Siemens NX Modelling, Product Design, Mechanical Analysis, G Code Scripting, Software Simulations
The goal was to redesign an end effector to improve the efficiency of the weld line. Due to the long process of completing such a task, involving "design a prototype, have it verified, manufacture the component, test it, and redo to further improve it", the team believed it to take 6 months to complete. Unsatisfied with leaving my work incomplete, I took the intitiative to find software online that would allow me to test various prototypes on an offline simulation. I managed to complete the project within 4 months.
- ● Design of various prototypes on Siemens NX
- ● Optimized prototypes using FEA
- ● Scripted G-Code to improve weld path for newly designed prototypes
- ● Facilitated testing via RoboGuide Simulation, minimizing lead time
- ● Improved cycle time by 140% -> $160,000 savings per year
- ● Presented to GM, propogating idea to simulate other lines
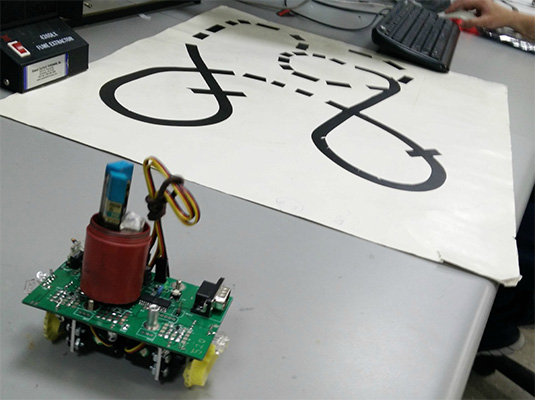
Autonomous Robot
- Me
- Date : November, 2014
- Used Technologies : Circuit Design, Circuit Testing, Hand Soldering, Schematic Capture, C-Programming
I managed to design and create an autonomous line following robot! A secondary feature was the ability to detect magnets "under the ground".
- ● Line following: Combination of IR sensor and photo diode
- ● Magnet detection: Amplified hall effect sensor output
- ● DC Motor control: Software based PWM
- ● Hand soldered components onto PCB
- ● Tested using bench equipment: MME, Oscilloscope, Wave Generator, PSU
- ● Implemented C Firmware for AtMega MCU